#include <Geometry.h>
Public Member Functions | |
| Prizm (const index_type &id) | |
| virtual | ~Prizm () |
| bool | intersect (const Ray< CoordType > &r, isect_info_t *isectData) const |
| template<> | |
| CVec3d | TransformToReference (double Coords[18], CVec3d worldPt) |
| template<> | |
| CVec3d | TransformToWorld (double Coords[18], const CVec3d *refPt) |
| template<> | |
| void | CalcInvJacobian (double Coords[18], const CVec3d &refPt, double invJ[9]) |
| template<> | |
| void | ReferenceToWorldJacobian (double Coords[18], const CVec3d &refPt, double J[9]) |
| template<typename TCoord > | |
| int | teselateReference (const int Pdeg[3], CVec3< TCoord > RefPoints[]) |
| template<> | |
| int | teselateReference (const int Pdeg[], CVec3< CoordType > RefPoints[]) |
Static Public Member Functions | |
| template<typename TCoord > | |
| static CVec3< TCoord > | TransformToReference (TCoord Coords[18], CVec3< TCoord > worldPt) |
| template<typename TCoord > | |
| static CVec3< TCoord > | TransformToWorld (TCoord Coords[18], const CVec3< TCoord > *refPt) |
| template<typename TCoord > | |
| static void | CalcInvJacobian (TCoord Coords[18], const CVec3< TCoord > &refPt, TCoord invJ[9]) |
| template<typename TCoord > | |
| static void | ReferenceToWorldJacobian (TCoord Coords[18], const CVec3< TCoord > &refPt, TCoord J[9]) |
| template<typename TCoord > | |
| static BBox3D | BoundingBox (fvmath::Vec3< TCoord > *v) |
| template<typename T > | |
| static fvmath::CVec3< T > | Centrum (const fvmath::Vec3< T > *elCoords) |
| template<typename T > | |
| static int | teselateReference (const int Pdeg[3], CVec3< T > RefPoints[]) |
| template<typename T > | |
| static int | teselateWorld (const int base, const int Pdeg[3], const CVec3< T > ElCoords[], std::vector< CVec3< T > > *TesPoints) |
| static int | getNumberOfShapeFunctions (const int Order[], int base) |
| FemViewer::Prizm::Prizm | ( | const index_type & | id | ) |
| virtual FemViewer::Prizm::~Prizm | ( | ) | [inline, virtual] |
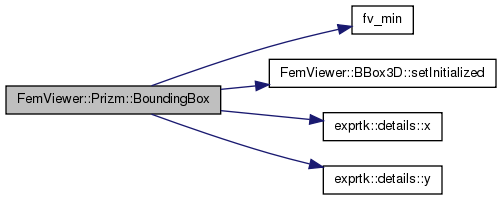
| BBox3D FemViewer::Prizm::BoundingBox | ( | fvmath::Vec3< TCoord > * | v | ) | [inline, static] |
| void FemViewer::Prizm::CalcInvJacobian | ( | double | Coords[18], | |
| const CVec3d & | refPt, | |||
| double | invJ[9] | |||
| ) | [inline] |
| void FemViewer::Prizm::CalcInvJacobian | ( | TCoord | Coords[18], | |
| const CVec3< TCoord > & | refPt, | |||
| TCoord | invJ[9] | |||
| ) | [inline, static] |


| fvmath::CVec3< T > FemViewer::Prizm::Centrum | ( | const fvmath::Vec3< T > * | elCoords | ) | [inline, static] |
| int FemViewer::Prizm::getNumberOfShapeFunctions | ( | const int | Order[], | |
| int | base | |||
| ) | [static] |


| bool FemViewer::Prizm::intersect | ( | const Ray< CoordType > & | r, | |
| isect_info_t * | isectData | |||
| ) | const [inline, virtual] |
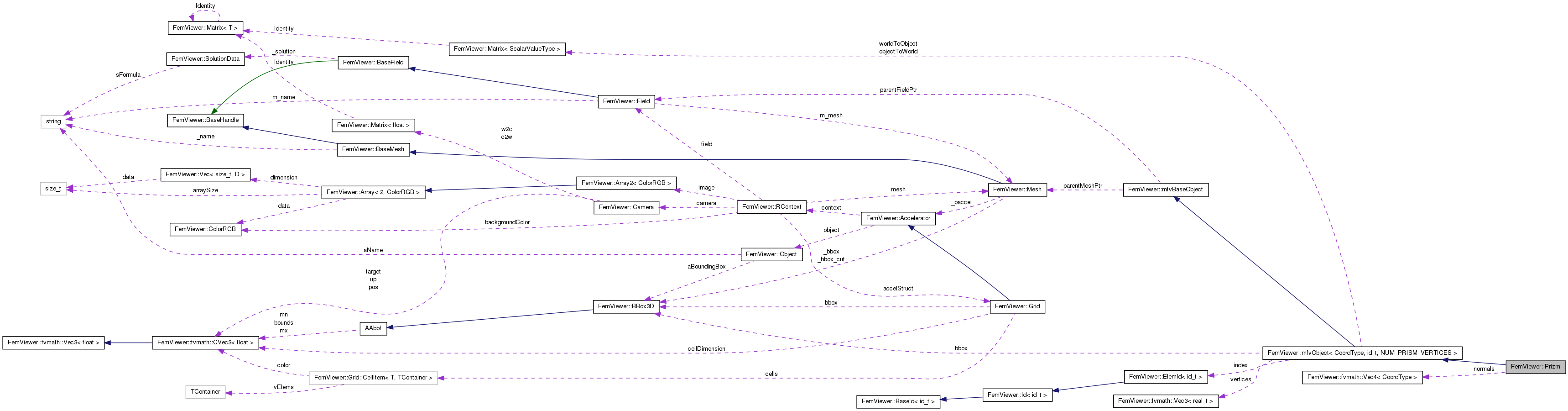
Implements FemViewer::mfvBaseObject.


| void FemViewer::Prizm::ReferenceToWorldJacobian | ( | double | Coords[18], | |
| const CVec3d & | refPt, | |||
| double | J[9] | |||
| ) | [inline] |
| void FemViewer::Prizm::ReferenceToWorldJacobian | ( | TCoord | Coords[18], | |
| const CVec3< TCoord > & | refPt, | |||
| TCoord | J[9] | |||
| ) | [inline, static] |


| int FemViewer::Prizm::teselateReference | ( | const int | Pdeg[], | |
| CVec3< CoordType > | RefPoints[] | |||
| ) | [inline] |
| int FemViewer::Prizm::teselateReference | ( | const int | Pdeg[3], | |
| CVec3< TCoord > | RefPoints[] | |||
| ) | [inline] |
| static int FemViewer::Prizm::teselateReference | ( | const int | Pdeg[3], | |
| CVec3< T > | RefPoints[] | |||
| ) | [inline, static] |

| int FemViewer::Prizm::teselateWorld | ( | const int | base, | |
| const int | Pdeg[3], | |||
| const CVec3< T > | ElCoords[], | |||
| std::vector< CVec3< T > > * | TesPoints | |||
| ) | [inline, static] |

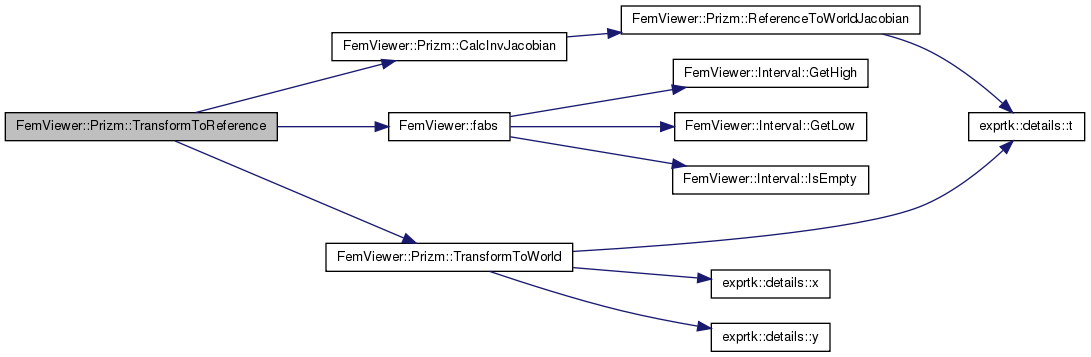
| CVec3d FemViewer::Prizm::TransformToReference | ( | double | Coords[18], | |
| CVec3d | worldPt | |||
| ) | [inline] |
| CVec3< TCoord > FemViewer::Prizm::TransformToReference | ( | TCoord | Coords[18], | |
| CVec3< TCoord > | worldPt | |||
| ) | [inline, static] |

| CVec3d FemViewer::Prizm::TransformToWorld | ( | double | Coords[18], | |
| const CVec3d * | refPt | |||
| ) | [inline] |
| CVec3< TCoord > FemViewer::Prizm::TransformToWorld | ( | TCoord | Coords[18], | |
| const CVec3< TCoord > * | refPt | |||
| ) | [inline, static] |

 1.6.1
1.6.1

