Solves the system of linear equations A*X=B or A'*X=B. More...
#include "slu_sdefs.h"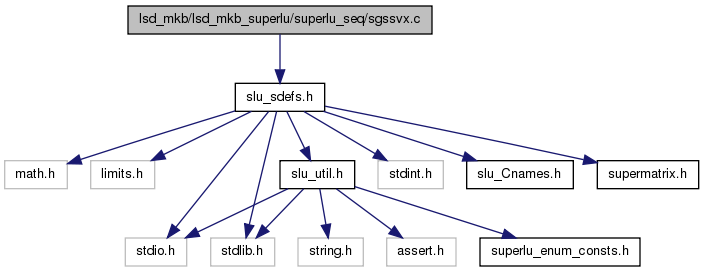
Functions | |
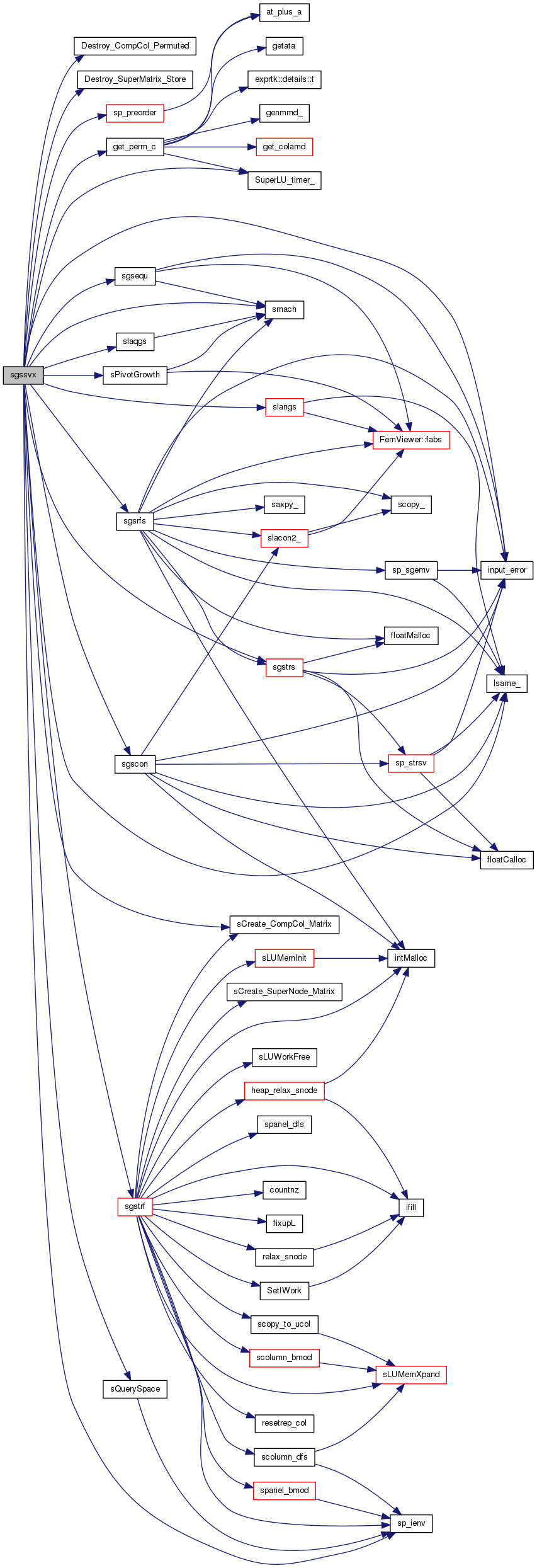
| void | sgssvx (superlu_options_t *options, SuperMatrix *A, int *perm_c, int *perm_r, int *etree, char *equed, float *R, float *C, SuperMatrix *L, SuperMatrix *U, void *work, int lwork, SuperMatrix *B, SuperMatrix *X, float *recip_pivot_growth, float *rcond, float *ferr, float *berr, GlobalLU_t *Glu, mem_usage_t *mem_usage, SuperLUStat_t *stat, int *info) |
Solves the system of linear equations A*X=B or A'*X=B.
-- SuperLU routine (version 3.0) -- Univ. of California Berkeley, Xerox Palo Alto Research Center, and Lawrence Berkeley National Lab. October 15, 2003
| void sgssvx | ( | superlu_options_t * | options, | |
| SuperMatrix * | A, | |||
| int * | perm_c, | |||
| int * | perm_r, | |||
| int * | etree, | |||
| char * | equed, | |||
| float * | R, | |||
| float * | C, | |||
| SuperMatrix * | L, | |||
| SuperMatrix * | U, | |||
| void * | work, | |||
| int | lwork, | |||
| SuperMatrix * | B, | |||
| SuperMatrix * | X, | |||
| float * | recip_pivot_growth, | |||
| float * | rcond, | |||
| float * | ferr, | |||
| float * | berr, | |||
| GlobalLU_t * | Glu, | |||
| mem_usage_t * | mem_usage, | |||
| SuperLUStat_t * | stat, | |||
| int * | info | |||
| ) |
Purpose =======
SGSSVX solves the system of linear equations A*X=B or A'*X=B, using the LU factorization from sgstrf(). Error bounds on the solution and a condition estimate are also provided. It performs the following steps:
1. If A is stored column-wise (A->Stype = SLU_NC):
1.1. If options->Equil = YES, scaling factors are computed to
equilibrate the system:
options->Trans = NOTRANS:
diag(R)*A*diag(C) *inv(diag(C))*X = diag(R)*B
options->Trans = TRANS:
(diag(R)*A*diag(C))**T *inv(diag(R))*X = diag(C)*B
options->Trans = CONJ:
(diag(R)*A*diag(C))**H *inv(diag(R))*X = diag(C)*B
Whether or not the system will be equilibrated depends on the
scaling of the matrix A, but if equilibration is used, A is
overwritten by diag(R)*A*diag(C) and B by diag(R)*B
(if options->Trans=NOTRANS) or diag(C)*B (if options->Trans
= TRANS or CONJ). 1.2. Permute columns of A, forming A*Pc, where Pc is a permutation
matrix that usually preserves sparsity.
For more details of this step, see sp_preorder.c. 1.3. If options->Fact != FACTORED, the LU decomposition is used to
factor the matrix A (after equilibration if options->Equil = YES)
as Pr*A*Pc = L*U, with Pr determined by partial pivoting.1.4. Compute the reciprocal pivot growth factor.
1.5. If some U(i,i) = 0, so that U is exactly singular, then the
routine returns with info = i. Otherwise, the factored form of
A is used to estimate the condition number of the matrix A. If
the reciprocal of the condition number is less than machine
precision, info = A->ncol+1 is returned as a warning, but the
routine still goes on to solve for X and computes error bounds
as described below. 1.6. The system of equations is solved for X using the factored form
of A. 1.7. If options->IterRefine != NOREFINE, iterative refinement is
applied to improve the computed solution matrix and calculate
error bounds and backward error estimates for it. 1.8. If equilibration was used, the matrix X is premultiplied by
diag(C) (if options->Trans = NOTRANS) or diag(R)
(if options->Trans = TRANS or CONJ) so that it solves the
original system before equilibration. 2. If A is stored row-wise (A->Stype = SLU_NR), apply the above algorithm
to the transpose of A: 2.1. If options->Equil = YES, scaling factors are computed to
equilibrate the system:
options->Trans = NOTRANS:
diag(R)*A*diag(C) *inv(diag(C))*X = diag(R)*B
options->Trans = TRANS:
(diag(R)*A*diag(C))**T *inv(diag(R))*X = diag(C)*B
options->Trans = CONJ:
(diag(R)*A*diag(C))**H *inv(diag(R))*X = diag(C)*B
Whether or not the system will be equilibrated depends on the
scaling of the matrix A, but if equilibration is used, A' is
overwritten by diag(R)*A'*diag(C) and B by diag(R)*B
(if trans='N') or diag(C)*B (if trans = 'T' or 'C'). 2.2. Permute columns of transpose(A) (rows of A),
forming transpose(A)*Pc, where Pc is a permutation matrix that
usually preserves sparsity.
For more details of this step, see sp_preorder.c. 2.3. If options->Fact != FACTORED, the LU decomposition is used to
factor the transpose(A) (after equilibration if
options->Fact = YES) as Pr*transpose(A)*Pc = L*U with the
permutation Pr determined by partial pivoting.2.4. Compute the reciprocal pivot growth factor.
2.5. If some U(i,i) = 0, so that U is exactly singular, then the
routine returns with info = i. Otherwise, the factored form
of transpose(A) is used to estimate the condition number of the
matrix A. If the reciprocal of the condition number
is less than machine precision, info = A->nrow+1 is returned as
a warning, but the routine still goes on to solve for X and
computes error bounds as described below. 2.6. The system of equations is solved for X using the factored form
of transpose(A). 2.7. If options->IterRefine != NOREFINE, iterative refinement is
applied to improve the computed solution matrix and calculate
error bounds and backward error estimates for it. 2.8. If equilibration was used, the matrix X is premultiplied by
diag(C) (if options->Trans = NOTRANS) or diag(R)
(if options->Trans = TRANS or CONJ) so that it solves the
original system before equilibration.See supermatrix.h for the definition of 'SuperMatrix' structure.
Arguments =========
options (input) superlu_options_t*
The structure defines the input parameters to control
how the LU decomposition will be performed and how the
system will be solved. A (input/output) SuperMatrix*
Matrix A in A*X=B, of dimension (A->nrow, A->ncol). The number
of the linear equations is A->nrow. Currently, the type of A can be:
Stype = SLU_NC or SLU_NR, Dtype = SLU_D, Mtype = SLU_GE.
In the future, more general A may be handled. On entry, If options->Fact = FACTORED and equed is not 'N',
then A must have been equilibrated by the scaling factors in
R and/or C.
On exit, A is not modified if options->Equil = NO, or if
options->Equil = YES but equed = 'N' on exit.
Otherwise, if options->Equil = YES and equed is not 'N',
A is scaled as follows:
If A->Stype = SLU_NC:
equed = 'R': A := diag(R) * A
equed = 'C': A := A * diag(C)
equed = 'B': A := diag(R) * A * diag(C).
If A->Stype = SLU_NR:
equed = 'R': transpose(A) := diag(R) * transpose(A)
equed = 'C': transpose(A) := transpose(A) * diag(C)
equed = 'B': transpose(A) := diag(R) * transpose(A) * diag(C). perm_c (input/output) int*
If A->Stype = SLU_NC, Column permutation vector of size A->ncol,
which defines the permutation matrix Pc; perm_c[i] = j means
column i of A is in position j in A*Pc.
On exit, perm_c may be overwritten by the product of the input
perm_c and a permutation that postorders the elimination tree
of Pc'*A'*A*Pc; perm_c is not changed if the elimination tree
is already in postorder. If A->Stype = SLU_NR, column permutation vector of size A->nrow,
which describes permutation of columns of transpose(A)
(rows of A) as described above. perm_r (input/output) int*
If A->Stype = SLU_NC, row permutation vector of size A->nrow,
which defines the permutation matrix Pr, and is determined
by partial pivoting. perm_r[i] = j means row i of A is in
position j in Pr*A. If A->Stype = SLU_NR, permutation vector of size A->ncol, which
determines permutation of rows of transpose(A)
(columns of A) as described above. If options->Fact = SamePattern_SameRowPerm, the pivoting routine
will try to use the input perm_r, unless a certain threshold
criterion is violated. In that case, perm_r is overwritten by a
new permutation determined by partial pivoting or diagonal
threshold pivoting.
Otherwise, perm_r is output argument. etree (input/output) int*, dimension (A->ncol)
Elimination tree of Pc'*A'*A*Pc.
If options->Fact != FACTORED and options->Fact != DOFACT,
etree is an input argument, otherwise it is an output argument.
Note: etree is a vector of parent pointers for a forest whose
vertices are the integers 0 to A->ncol-1; etree[root]==A->ncol. equed (input/output) char*
Specifies the form of equilibration that was done.
= 'N': No equilibration.
= 'R': Row equilibration, i.e., A was premultiplied by diag(R).
= 'C': Column equilibration, i.e., A was postmultiplied by diag(C).
= 'B': Both row and column equilibration, i.e., A was replaced
by diag(R)*A*diag(C).
If options->Fact = FACTORED, equed is an input argument,
otherwise it is an output argument. R (input/output) float*, dimension (A->nrow)
The row scale factors for A or transpose(A).
If equed = 'R' or 'B', A (if A->Stype = SLU_NC) or transpose(A)
(if A->Stype = SLU_NR) is multiplied on the left by diag(R).
If equed = 'N' or 'C', R is not accessed.
If options->Fact = FACTORED, R is an input argument,
otherwise, R is output.
If options->zFact = FACTORED and equed = 'R' or 'B', each element
of R must be positive. C (input/output) float*, dimension (A->ncol)
The column scale factors for A or transpose(A).
If equed = 'C' or 'B', A (if A->Stype = SLU_NC) or transpose(A)
(if A->Stype = SLU_NR) is multiplied on the right by diag(C).
If equed = 'N' or 'R', C is not accessed.
If options->Fact = FACTORED, C is an input argument,
otherwise, C is output.
If options->Fact = FACTORED and equed = 'C' or 'B', each element
of C must be positive. L (output) SuperMatrix*
The factor L from the factorization
Pr*A*Pc=L*U (if A->Stype SLU_= NC) or
Pr*transpose(A)*Pc=L*U (if A->Stype = SLU_NR).
Uses compressed row subscripts storage for supernodes, i.e.,
L has types: Stype = SLU_SC, Dtype = SLU_S, Mtype = SLU_TRLU. U (output) SuperMatrix*
The factor U from the factorization
Pr*A*Pc=L*U (if A->Stype = SLU_NC) or
Pr*transpose(A)*Pc=L*U (if A->Stype = SLU_NR).
Uses column-wise storage scheme, i.e., U has types:
Stype = SLU_NC, Dtype = SLU_S, Mtype = SLU_TRU. work (workspace/output) void*, size (lwork) (in bytes)
User supplied workspace, should be large enough
to hold data structures for factors L and U.
On exit, if fact is not 'F', L and U point to this array. lwork (input) int
Specifies the size of work array in bytes.
= 0: allocate space internally by system malloc;
> 0: use user-supplied work array of length lwork in bytes,
returns error if space runs out.
= -1: the routine guesses the amount of space needed without
performing the factorization, and returns it in
mem_usage->total_needed; no other side effects.See argument 'mem_usage' for memory usage statistics.
B (input/output) SuperMatrix*
B has types: Stype = SLU_DN, Dtype = SLU_S, Mtype = SLU_GE.
On entry, the right hand side matrix.
If B->ncol = 0, only LU decomposition is performed, the triangular
solve is skipped.
On exit,
if equed = 'N', B is not modified; otherwise
if A->Stype = SLU_NC:
if options->Trans = NOTRANS and equed = 'R' or 'B',
B is overwritten by diag(R)*B;
if options->Trans = TRANS or CONJ and equed = 'C' of 'B',
B is overwritten by diag(C)*B;
if A->Stype = SLU_NR:
if options->Trans = NOTRANS and equed = 'C' or 'B',
B is overwritten by diag(C)*B;
if options->Trans = TRANS or CONJ and equed = 'R' of 'B',
B is overwritten by diag(R)*B. X (output) SuperMatrix*
X has types: Stype = SLU_DN, Dtype = SLU_S, Mtype = SLU_GE.
If info = 0 or info = A->ncol+1, X contains the solution matrix
to the original system of equations. Note that A and B are modified
on exit if equed is not 'N', and the solution to the equilibrated
system is inv(diag(C))*X if options->Trans = NOTRANS and
equed = 'C' or 'B', or inv(diag(R))*X if options->Trans = 'T' or 'C'
and equed = 'R' or 'B'. recip_pivot_growth (output) float*
The reciprocal pivot growth factor max_j( norm(A_j)/norm(U_j) ).
The infinity norm is used. If recip_pivot_growth is much less
than 1, the stability of the LU factorization could be poor. rcond (output) float*
The estimate of the reciprocal condition number of the matrix A
after equilibration (if done). If rcond is less than the machine
precision (in particular, if rcond = 0), the matrix is singular
to working precision. This condition is indicated by a return
code of info > 0. FERR (output) float*, dimension (B->ncol)
The estimated forward error bound for each solution vector
X(j) (the j-th column of the solution matrix X).
If XTRUE is the true solution corresponding to X(j), FERR(j)
is an estimated upper bound for the magnitude of the largest
element in (X(j) - XTRUE) divided by the magnitude of the
largest element in X(j). The estimate is as reliable as
the estimate for RCOND, and is almost always a slight
overestimate of the true error.
If options->IterRefine = NOREFINE, ferr = 1.0. BERR (output) float*, dimension (B->ncol)
The componentwise relative backward error of each solution
vector X(j) (i.e., the smallest relative change in
any element of A or B that makes X(j) an exact solution).
If options->IterRefine = NOREFINE, berr = 1.0.Glu (input/output) GlobalLU_t * If options->Fact == SamePattern_SameRowPerm, it is an input; The matrix A will be factorized assuming that a factorization of a matrix with the same sparsity pattern and similar numerical values was performed prior to this one. Therefore, this factorization will reuse both row and column scaling factors R and C, both row and column permutation vectors perm_r and perm_c, and the L & U data structures set up from the previous factorization. Otherwise, it is an output.
mem_usage (output) mem_usage_t*
Record the memory usage statistics, consisting of following fields:
stat (output) SuperLUStat_t*
Record the statistics on runtime and floating-point operation count.
See slu_util.h for the definition of 'SuperLUStat_t'. info (output) int*
= 0: successful exit
< 0: if info = -i, the i-th argument had an illegal value
> 0: if info = i, and i is
<= A->ncol: U(i,i) is exactly zero. The factorization has
been completed, but the factor U is exactly
singular, so the solution and error bounds
could not be computed.
= A->ncol+1: U is nonsingular, but RCOND is less than machine
precision, meaning that the matrix is singular to
working precision. Nevertheless, the solution and
error bounds are computed because there are a number
of situations where the computed solution can be more
accurate than the value of RCOND would suggest.
> A->ncol+1: number of bytes allocated when memory allocation
failure occurred, plus A->ncol.
 1.6.1
1.6.1

